
目录
1.MEW技术介绍
2.研究方法与结果
3.磁性机器人操纵货物试验
4.研究结论
1. MEW技术介绍
熔融静电纺丝书写(MEW)技术是熔体静电纺丝与3D打印相结合的一种新兴技术。与传统3D打印技术相比,该方法可以实现亚微米纤维的精确定位,比3D打印技术小约2个数量级。这些产品作为生物相容性支架主要应用于细胞培养和组织工程。MEW实现了可编程静电纺丝,在批量制备模式下,可以在纤维沉积位置、纤维直径和纤维形状方面表现出高水平的可控性。通过MEW技术,可以在计算机的自动控制下设计出复杂的形状或几何形状。它被认为是“切割”的,可以获得单个或阵列的金属纳米线、量子点、聚合物纳米圆柱。新技术可以人工设计超细纤维,而切片技术可以将超细纤维切片制成纳米或微结构。
2. 研究方法与结果
哈尔滨工业大学韩晓军课题组和奥胡斯大学Menglin Chen课题组将这种经济有效且简单的新方法应用于制造磁性微型机器人。MEW直接打印不对称的聚己内酯(PCL)模板来制备聚二甲基硅氧烷(PDMS)通道。随后,用PCL/Fe3O4混合物填充通道。凝固后,磁性不对称坯料脱模,利用切割技术切割成蝌蚪状的磁性微型机器人。不对称的蝌蚪状磁性微型机器人通过无线动态磁场实现推进和滚动运动。这种蝌蚪状的微型机器人可以很好地控制操作和货物运输。制备工艺流程如图1所示。
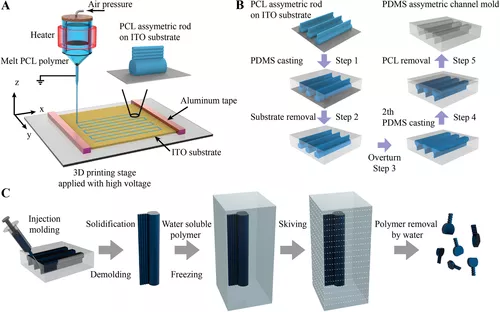
图1 蝌蚪状磁性微型机器人的制造工艺示意图。聚己内酯(PCL)不对称模板(A)、聚二甲基硅氧烷(PDMS)不对称通道(B)、PCL/Fe3O4不对称微型机器人(C)。
为了制备不同型号的微型机器人,需要制备不同宽度和深度的PDMS通道。通过调节集电极速度,获得不同直径和高度的PCL模板,即可制作不同宽度和深度的PDMS通道。通过加快收集器,可减小 PDMS通道的宽度和深度。深度/宽度与收集器速度的关系按下式拟合。
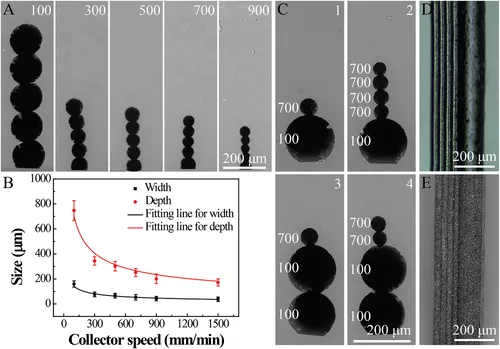
图2 聚二甲基硅氧烷(PDMS)通道和磁性聚己内酯(PCL)/Fe3O4不对称坯料的表征。(A):用0.9毫米的针以不同的打印速度制造的PDMS通道的横截面扫描电子显微镜(SEM)图像。(B):通道的宽度和深度与打印速度的关系。(C):形状不对称PDMS通道横截面的SEM图像。(D):通道2的光学显微镜图像。(E) :以通道2为模板制备的磁性PCL/Fe3O4不对称坯料的SEM图像。每幅图像上均标明了速度值,单位为mm 。
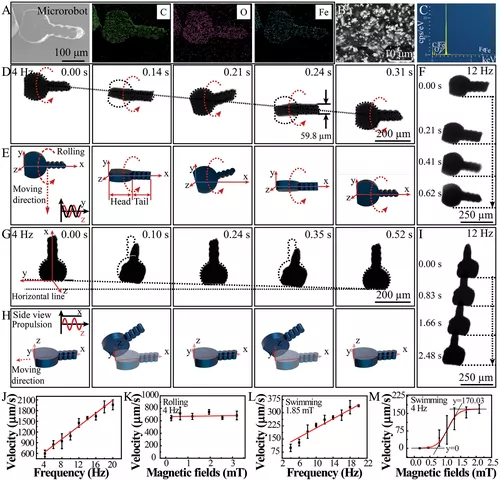
图3 蝌蚪状磁性微型机器人的特性及可控制运动。(A)蝌蚪状聚己内酯(PCL)/Fe3O4磁性微机器人的SEM图像,元素C、O和Fe映射。蝌蚪状PCL/Fe3O4微型机器人的放大SEM图像(B)和EDX光谱(C)。微机器人在滚动(D,E)和推进(G,H)磁场(4 Hz, 1.85 mT)作用下的光学显微镜图像和三维运动原理图。微机器人在滚动(F)和推进(I)磁场(12hz, 1.85 mT)下运动的延时光学图像。在滚动模式(J,K)和推进模式(L,M)下,蝌蚪状微型机器人的速度与磁场频率和强度的比较。
3.磁性机器人操纵货物试验
研究人员研究了使用磁推进的蝌蚪状微型机器人操纵货物的可能性。蝌蚪状微型机器人和磷酸钙(CaP)球状货物的前部轮廓用黑色虚线标记。一个货物操作过程如图4A所示。微型机接近球形货物(直径约89.8µm),使货物沿着设计的运动轨迹1进行高效操纵。由于蝌蚪状微型机器人的头部与水平线不平行,球状的货物丢失了。丢球后,这个蝌蚪状的微型机器人被手动控制,用设计的2号路线再次接近球。由于球从指定位置偏移,第3部分被临时更改为一个较小的半圆路径,正如在21.94秒捕捉到的图像所示。除了单一的货物操作,滚动微型机器人还可以通过直线路线3一起滚动来实现多货物运输(图4B)。multicargos以309.5m 的速度被移动535.4m。新技术制造的微型机器人在无线磁控下表现出了可控制的运动能力和货物运输能力。
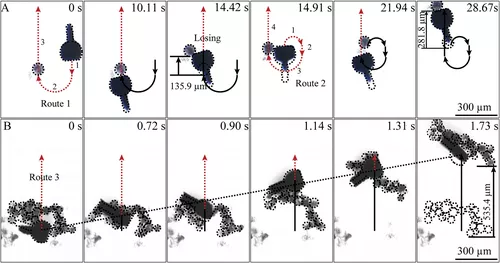
图4 蝌蚪状微型机器人在4赫兹和1.85 mT的磁场下以两种运动方式携带微球。(A)单次操纵货物时,船首的推进方式。(B)多货物运输的滚动方式。
4.研究结论
韩晓军教授和Menglin Chen以及他们的团队成功地制造了磁性蝌蚪状微型机器人,通过控制磁场实现滚动或推进运动。磁场的频率、强度和方向可以方便地调节蝌蚪状微型机器人的速度和方向。这种蝌蚪状的微型机器人还可以在微环境中以高效的运动和精确的可控性将一件货物或多件货物运送到指定的目的地。新技术的发展使得构建具有可设计的截面形态的微型机器人成为可能。基于从钢坯到微片的精密切削工艺,该制造工艺具有高度可重复性、低成本和大规模生产能力。重要的是,通过在成型过程中引入不同的功能纳米材料,可以设计出具有不同功能甚至多功能的微型机器人,从而制造出具有生物灵感的微型机器人。新技术、微成型技术和剥皮技术的结合在制造多功能微型机器人方面具有巨大的潜力。
论文链接: https://onlinelibrary.wiley.com/doi/10.1002/advs.202003177
https://www.nanofiberlabs.com/
http://www.qingzitech.com/
标题:《Advanced Sciecne》:面向磁性微型机器人的熔融近场静电纺丝直写制备
地址:http://www.0317jhgd.com//dfqcxw/24985.html






